
#Arduino #3D printer #아두이노 #3D프린터 # 3D프린터개발산업기사
로터리인코더(로타리엔코더) 쉽게 이해하기
0. 서론
로터리 인코더는 CLK와 DT라는 두개의 포인트를 가지고 회전을 검출하는 장치입니다.
사실상 원리는 간단하고 이를 아두이노에 활용하기에도 쉽지만 의외로 이 인코더의 작동원리를 이해하기 힘들어 아두이노 코드에 접목하기가 쉽지 않은 것이 현실입니다.
이에 오늘은 로터리인코더(로타리엔코더)의 회전방향 검출에 대해 알아보도록 하겠습니다.
1. 로터리 인코더 작동원리
로터리 인코더는 CLK와 DT라는 두개의 포인트로 회전을 검출합니다.
발광부-수광부로 이해해도 좋고, 금속 원판에 포인트가 붙었다 떨어졌다로 이해해도 좋습니다.
어찌되었든 이 두 지점이 거리를 두고 위치하고 있기 때문에 원판이 돌아갈 때 시간차이가 나게 되고, 이 시간차이를 가지고 이 원판이 시계방향으로 회전하는지, 반시계방향으로 회전하는지를 알아낼 수 있습니다.
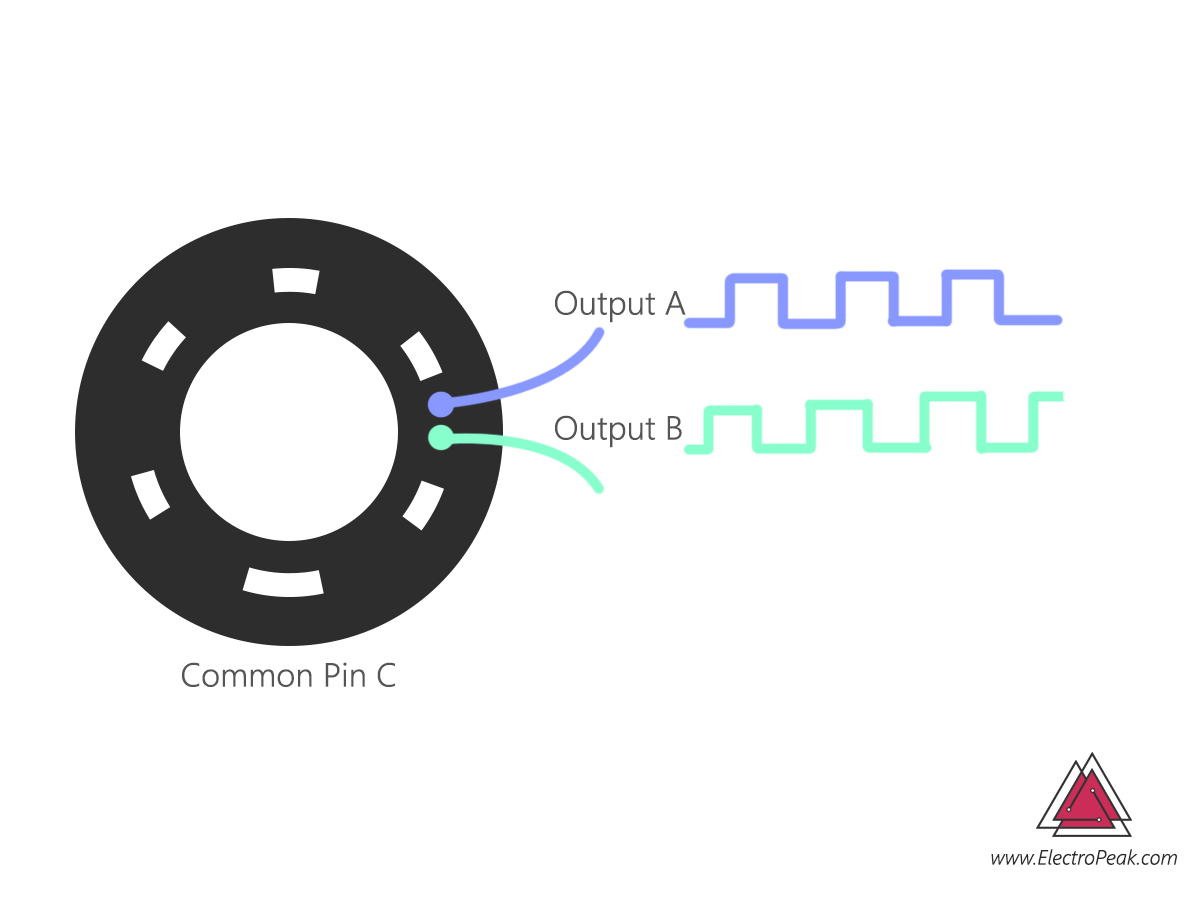
그림의 이해를 쉽게 하기 위해 원형철판에 두 지점이 닿아있다고 보겠습니다. 이 상황에선 두 포인트 전부 전기가 통하는 상태입니다.(수치로는 1 혹은 HIGH라고 볼 수 있습니다.)
또한 CLK(그림의 Output A)는 DT(Output B)보다 왼쪽에 위치하며, 이미지상으로는 위쪽에 위치합니다.
일단 시계방향으로 돌아갈때를 보죠.
이 상황에서 시계방향으로 돌면 CLK가 먼저 원판에서 떨어집니다. 그리고 그 다음 DT가 떨어지고, 그 다음 다시 CLK가 원판에 붙고, 다시 DT가 붙습니다.
1주기를 살펴보면
| CLK | DT |
| 1 | 1 |
| 0 | 1 |
| 0 | 0 |
| 1 | 0 |
| 1 | 1 |
이렇게 되는 것을 볼 수 있습니다.
또한 최소 분해능은 1/4주기로 볼 수 있습니다. 1/4주기마다 회전을 검출할 수 있기 때문이죠.
그럼 반시계방향으로 돌아가는 상황을 보도록 합시다.
원판이 반시계방향으로 돌면 DT가 먼저 원판에서 떨어집니다. 다음 CLK가 떨어지고, 다음 DT가 다시 붙고, 다음 CLK가 붙겠죠.
1주기를 살펴보면
| CLK | DT |
| 1 | 1 |
| 1 | 0 |
| 0 | 0 |
| 0 | 1 |
| 1 | 1 |
이렇게 되는 것을 볼 수 있습니다.
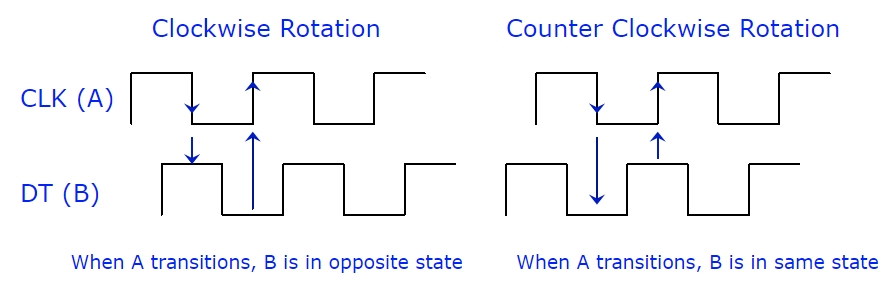
이를 펄스그림으로 보게되면 아래와 같습니다.
2. 소자의 이해(HW-040)
저희가 쓸 소자는 HW040이라는 소자입니다. 이 소자의 특징은 로터리 인코더가 한번 딸깍하고 돌아갈때 위에서 말한 1주기 중 1/2주기씩 움직인다는 것입니다. 이를 이미지로 설명하면 원판에 둘다 붙어있다가 한번 딸깍에 둘다 떨어지고, 다음 딸깍에 둘다 붙는다는 말이 되죠. 참고로 첫 시작값은 보통 CLK, DT 모두 1값으로 시작하는게 보통이나 상황에 따라 달라질 수 있기에 소스코드에서 한번 처음 읽어주도록 합시다.
3. 코드에의 적용
이렇게 1주기에 CLK와 DT값이 4가지로 변화하기 때문에 이 모든 값에 대응해서 코딩을 해야할 것 같지만(물론 이런 경우가 제일 완벽하겠죠), 자세히 들여다보면 어떤 규칙이 있습니다. 바로 CLK값이 변화할때 시계방향이면 DT와 읽는 값이 정 반대이고(CLK가 왼쪽이므로 원판에서 먼저떨어집니다), 반시계방향이면 CLK값이 변화할때 DT값이랑 같다는 것이죠.(CLK가 왼쪽인데, CLK에서 변화가 감지될 때는 이미 DT값이 변한 이후입니다.)
특히 저희가 쓸 소자는 1번 딸깍에 1/2주기씩 진행하기 때문에 모든 상황에 대해서 코딩하는 것이 낭비라고 볼 수도 있기도 하고, 한번 딸깍에 코딩으로 반응이 와야하기 때문에 모든 주기에 대해서 코딩하기 보단 변화를 가지고 코딩하는게 좋습니다.(1주기 코딩을 하게되면 두번 딸깍해야 반응이 오겠죠)
여기서의 포인트는 딱 두가지입니다.
1) CLK값이 변화할때
2) 그 순간 DT와 CLK값의 차이(정방향 변화: 두 값이 차이, 역방향 변화: 두값이 동일)
그럼 코드를 작성해보겠습니다. 이전과 같이 LED는 각 2, 3, 4번 핀에 대응시키고 로터리 인코더의 CLK, DT는 각 8, 9번 핀에 대응시키겠습니다.(SW는 그냥 스위치처럼 사용하기에 편리하므로 이번 포스팅에서는 제외하겠습니다.) 목표는 로터리 인코더가 오른쪽으로 돌면 빨간불, 왼쪽으로 돌면 파란불이 들어오게 하는 것입니다.
#define LED_R 2
#define LED_G 3
#define LED_B 4
#define CLK 8
#define DT 9
bool pre_clk = 0;
void setup() {
pinMode(LED_R, OUTPUT);
pinMode(LED_G, OUTPUT);
pinMode(LED_B, OUTPUT);
pinMode(CLK, INPUT);
pinMode(DT, INPUT);
pre_clk = digitalRead(CLK);
}
void loop() {
bool cur_clk = digitalRead(CLK);
if(pre_clk != cur_clk){
if(digitalRead(DT) != cur_clk){
digitalWrite(LED_R, HIGH);
digitalWrite(LED_G, LOW);
digitalWrite(LED_B, LOW);
}
else{
digitalWrite(LED_R, LOW);
digitalWrite(LED_G, LOW);
digitalWrite(LED_B, HIGH);
}
}
pre_clk = cur_clk;
}'Study > Arduino&AVR' 카테고리의 다른 글
| [Arduino/아두이노] 라이브러리 추가하기! (0) | 2022.11.12 |
|---|---|
| [Arduino/아두이노] 아두이노 기본 프로젝트로 보드 작동 확인해보기 (0) | 2022.11.08 |
| [Arduino/아두이노] 아두이노 보드 연결하여 기본 세팅 및 포트 설정하기 (0) | 2022.11.07 |
| [아두이노/Arduino] 아두이노 IDE(통합 개발 환경) 다운받고 설치하고 실행하기 (0) | 2022.11.06 |
| [아두이노/3D프린터개발산업기사] millis() 함수와 delay() 함수의 차이 (0) | 2021.08.20 |





